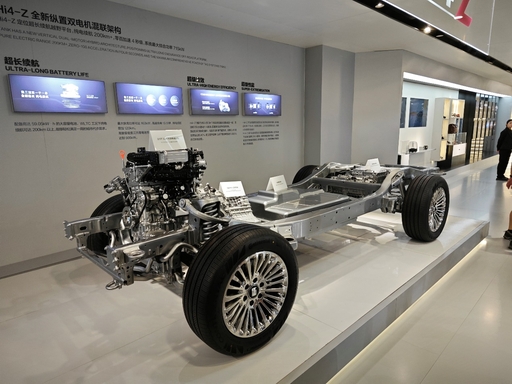
一、Hi4 整体架构(实物 + 原理)
Hi4 是长城 “P2+P4 双电机 + 2 挡 / 4 挡 DHT” 电混四驱,无机械传动轴,前后轴独立电驱动。

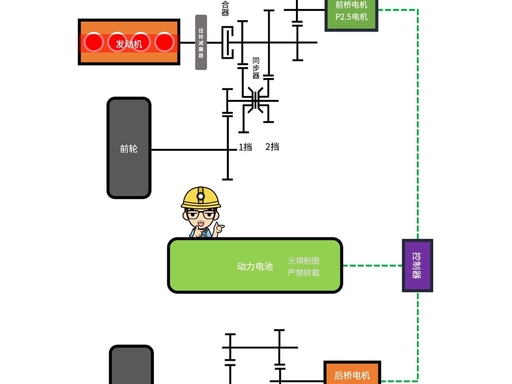
二、动力流原理图(二代 / 标准版,2 挡 DHT)
前桥:1.5T 混动专用发动机 + P2.5 电机(70kW)+ 2 挡 DHT
后桥:P4 电机(150kW)+ 1 挡减速
电池:大容量三元锂,支持快充
三、Hi4 家族分支(Hi4 / Hi4‑T / Hi4‑Z)
Hi4(标准版):横置前驱 2 挡 DHT + P4 电后驱,城市 / 家用
Hi4‑T:纵置 P2+9AT + 机械四驱,硬派越野(如坦克)

Hi4‑Z:纵置功率分流 + 3DHT + P4,兼顾效率与越野
四、核心部件拆解(2 挡 DHT 内部)
1 轴:发动机输入 + 离合器 C0
2 轴:P2.5 电机 + 1 挡 / 2 挡齿轮组
3 轴:输出到前轴


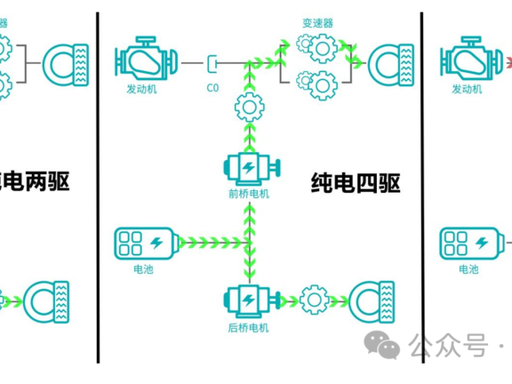
五、三擎九模(部分工况)
纯电两驱(后驱):P4 单独驱动
纯电四驱:P2.5+P4 同时驱动
串联增程:发动机→P2.5 发电→P4 驱动
并联四驱:发动机直驱 + 双电机助力
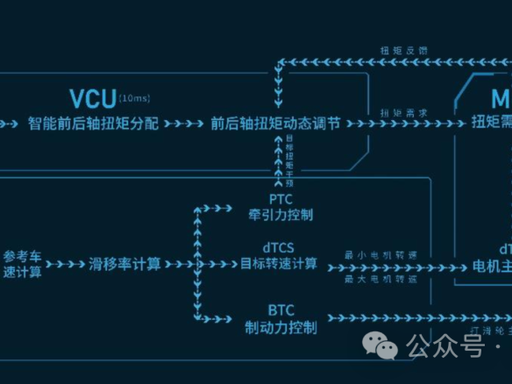
六、iTVC 智能扭矩矢量控制
毫秒级分配前后轴扭矩(0–100%)
dTCS 电机主动防滑,提升雨雪 / 越野稳定性
这里为你绘制文字版标准原理图(带标号、动力流向、工况标注),同时附可视化结构示意 + 完整解读,可直接对照绘图 / 使用,分标准版 Hi4(2 挡 DHT+P4 电四驱) 主流架构:
长城 Hi4 混动四驱系统 总装原理图(标号 + 动力流向)
整体布局:前置动力单元 + 后置独立电驱单元,无机械传动轴
【部件标号清单】
混动专用发动机(1.5T/1.5L)
主离合器 C0
P2.5 驱动 / 发电一体电机(前桥电机)
2 挡 DHT 变速箱(1/2 挡齿轮组 + 换挡机构)
前主减 + 差速器(前桥输出)
动力电池包
整车控制器 VCU + 电机控制器 MCU
高压线束
P4 后置驱动电机(后桥主电机)
后桥减速机构 + 差速器
iTVC 智能扭矩控制系统(电控单元)
【平面结构总图(可视化排版)】
┌─────────────────────────────────────────────────────────────┐ │ 【前桥动力总成】 │ │ [1发动机] ──[2离合器C0] ──┬──[3 P2.5电机] ──[4 2挡DHT] ──[5前桥] │ │ │ │ │ └────────── 发电支路 ───┐ │ └─────────────────────────────────────────────────┼────────────┘ │ [6动力电池] ◄───[7电控单元] ◄──┘ │ │ 高压电 ▼ ┌─────────────────────────────────────────────────────────────┐ │ 【后桥独立电驱总成】 │ │ [7电控单元] ──[8高压线束] ──[9 P4电机] ──[10后桥减差] ──后轮 │ └─────────────────────────────────────────────────────────────┘ ↓ [11 iTVC扭矩矢量控制](统筹前后轴扭矩分配)
【主流工况・动力流向标注】
工况 1:纯电后驱(城市低速、通勤)
流向:6 电池 → 7 电控 → 9 P4 电机 → 10 后桥 → 后轮
状态:发动机 1、离合器 2、P2.5 电机 3 全部断开,前桥无动力
工况 2:纯电四驱(湿滑路面、起步加速)
流向:6 电池 → 7 电控 → 分两路
① 一路:3 P2.5 电机 → 4 DHT → 5 前桥 → 前轮
② 二路:9 P4 电机 → 10 后桥 → 后轮
状态:发动机 1 不启动,双电机同时输出
工况 3:串联增程(中低速、亏电行驶)
流向:1 发动机 → 2 离合器 → 3 P2.5 电机(发电)→ 7 电控 → 6 电池 / 直接供电 → 9 P4 电机 → 后轮
状态:发动机只发电,不直驱车轮,前桥无行驶动力
工况 4:并联四驱(高速、全力加速)
流向:
主路:1 发动机 → 2 离合器 → 4 DHT → 5 前桥(发动机直驱前轮)
辅助路:6 电池 → 3 P2.5 电机 + 9 P4 电机 双电机同时补力
状态:发动机 + 双电机三擎合力,全轮驱动
工况 5:能量回收(减速 / 刹车)
流向:车轮 → 驱动电机反转(3、9)→ 7 电控 → 6 电池(回充)
补充关键说明
传动特点:前后桥无机械硬连接,完全靠高压电 + 电控实现四驱,属于电四驱,结构更简单、响应更快。
2 挡 DHT 作用:让发动机能在高速区间直驱,规避纯串联高速油耗高的问题。
11 号 iTVC:实时调节前后轴动力占比(0~100% 范围),配合 dTCS 实现防滑、脱困。