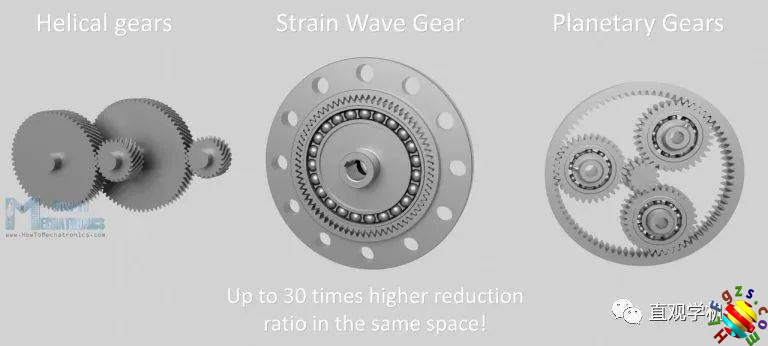
谐波齿轮是一种独特的机械齿轮系统,在紧凑轻便的包装中允许很高的减速比。与传统的齿轮系统(例如斜齿轮或行星齿轮)相比,它在相同的空间内可实现高达30倍的更高减速比。除此之外,它还具有零齿隙特性,高扭矩,准确性和可靠性。因此,该齿轮系统可用于许多应用,包括机器人技术,航空航天,医疗机器,铣床,制造设备等。
谐波传动是1957年由沃尔顿·穆塞发明的。
它是如何工作的
谐波传动有三个关键部件,一个波形发生器,一个挠性花键和一个圆形花键。
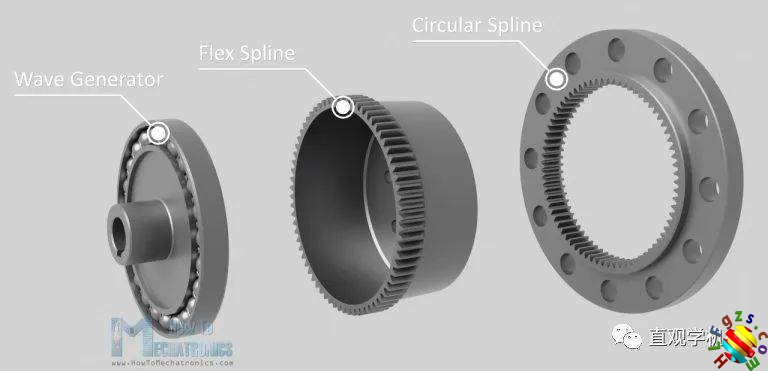
波形发生器为椭圆形,由一个椭圆形轮毂和一个特殊的薄壁轴承组成,轴承遵循轮毂的椭圆形。这是齿轮组的输入,它连接到电机轴上。
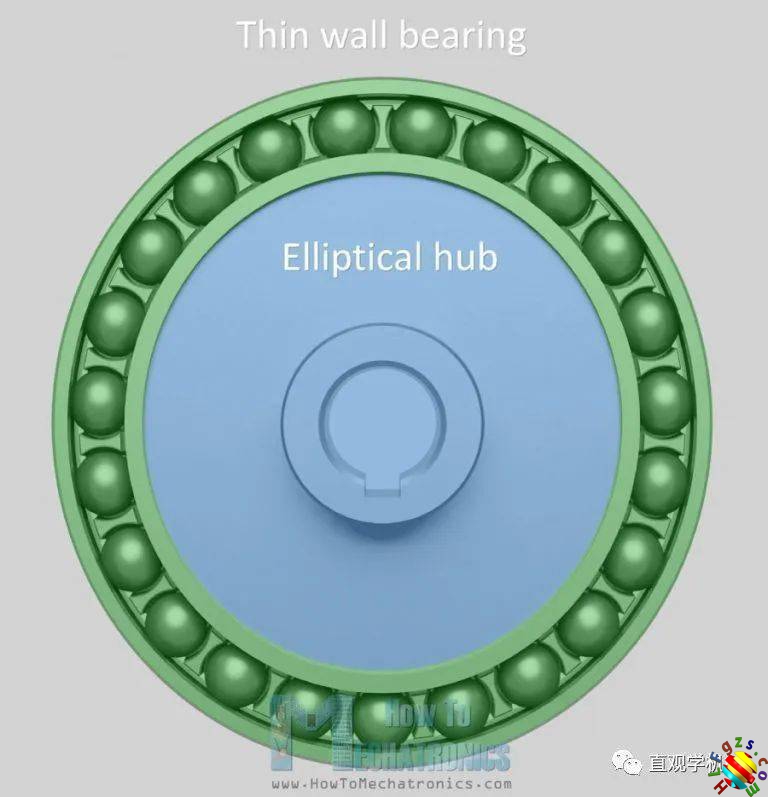
当波形发生器旋转时,它产生波浪运动。
挠性花键有一个圆柱形的杯状结构,由柔韧但抗扭的合金钢材料制成。杯子的侧面很薄,但是底部又厚又硬。
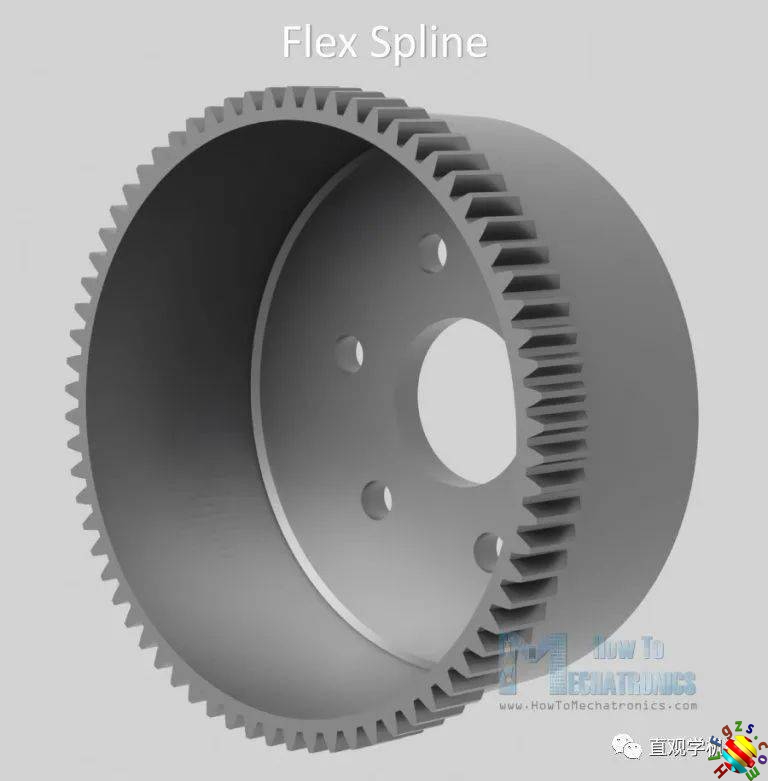
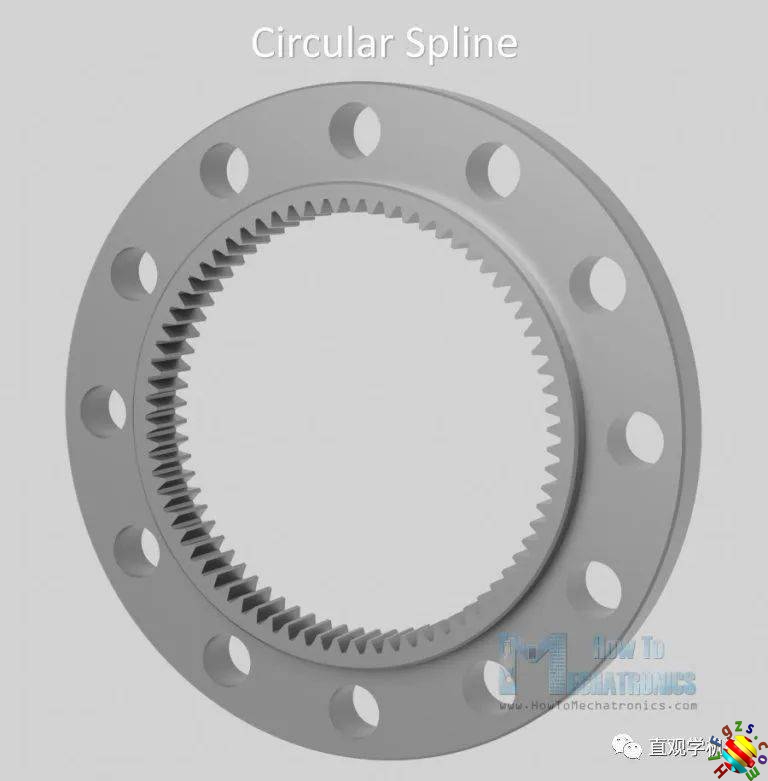
杯子的开口端是柔性的,但是封闭端是相当刚性的,因此我们可以将它用作输出端,并将输出法兰连接到其上。挠性花键在杯的开口端有外齿。另一方面,圆形花键是一个内部有齿的刚性环。圆弧花键比柔轮花键多两个齿,这实际上是应谐波传动系统的关键设计。
因此,当我们将波形发生器插入Flex样条曲线时,Flex样条曲线将采用波形发生器的形状。

当波形发生器旋转时,它会使挠性花键的开口端径向变形。波形发生器和挠性花键然后被放置在圆形花键内,将齿啮合在一起。
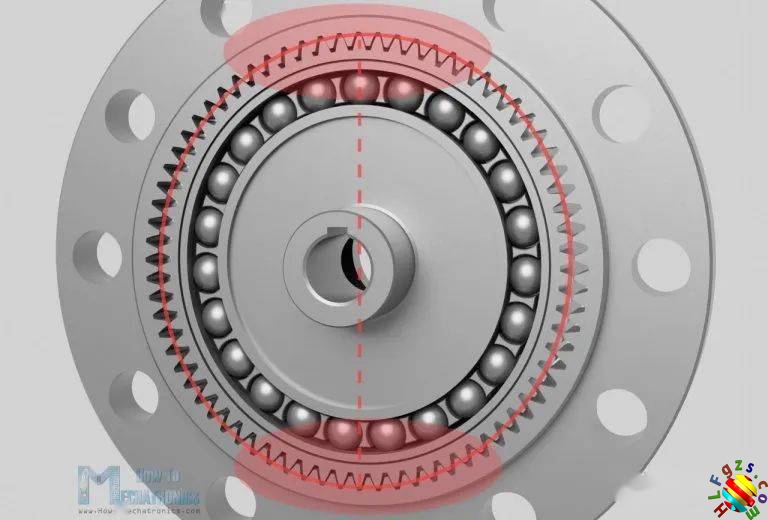
由于弹性花键的椭圆形状,牙齿仅在弹性花键的相对两侧的两个区域啮合,并且这两个区域跨越波发生器椭圆的主轴。
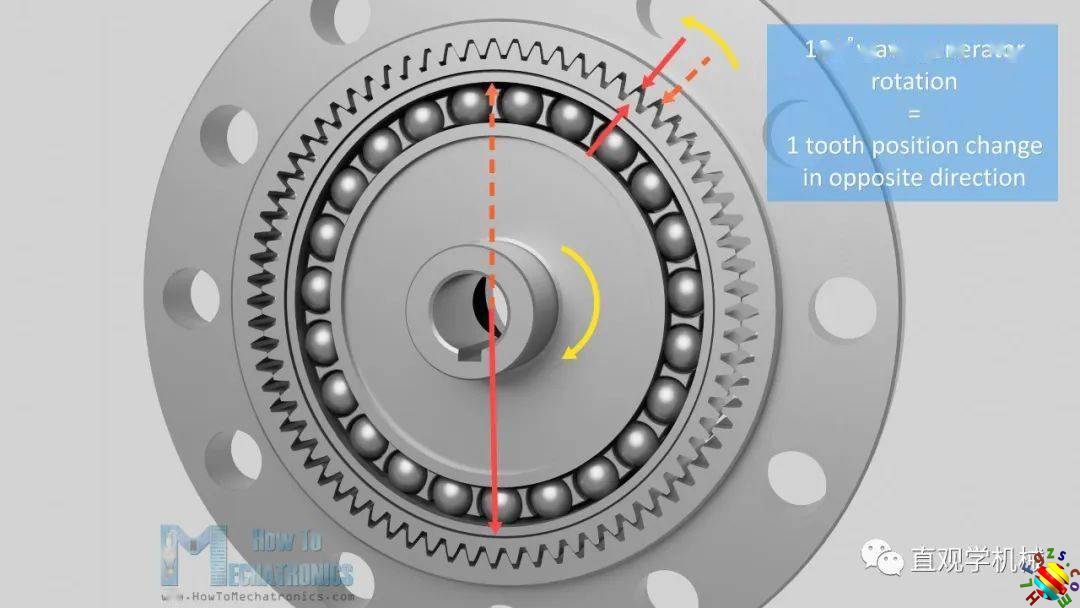
现在,随着波形发生器的旋转,与圆形花键啮合的挠性花键齿将慢慢改变位置。由于柔性花键和圆形花键之间的齿数不同,对于波形发生器每旋转180度,齿啮合将导致挠性花键相对于波形发生器向后少量旋转。换句话说,随着波形发生器每旋转180度,与圆形花键啮合的挠性花键齿将仅前进一个齿。
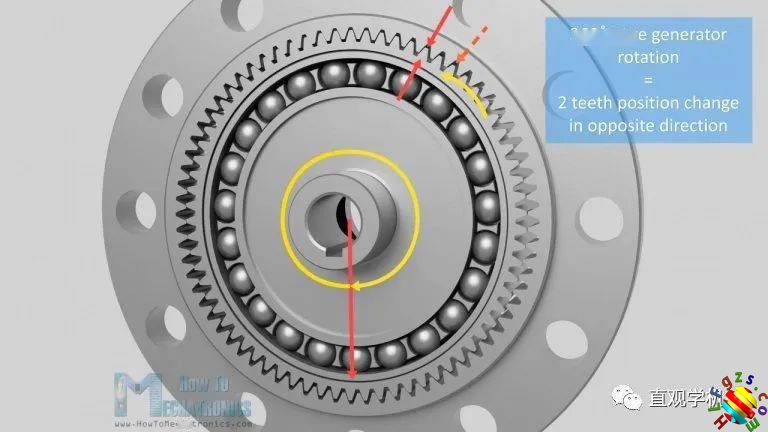
因此,波形发生器旋转360度时,挠性花键将改变位置或前进两个齿。
例如,如果挠性花键有200个齿,波形发生器必须旋转100圈,柔轮花键才能前进200个齿,或者柔轮花键只能旋转一圈。这是100:1的比例。在这种情况下,圆弧花键将有202个齿,因为圆弧花键的齿数总是比挠性花键的齿数多两个。
我们可以用下面的公式很容易地计算出减速比。该比率等于挠性花键齿–圆形花键齿除以挠性花键齿。
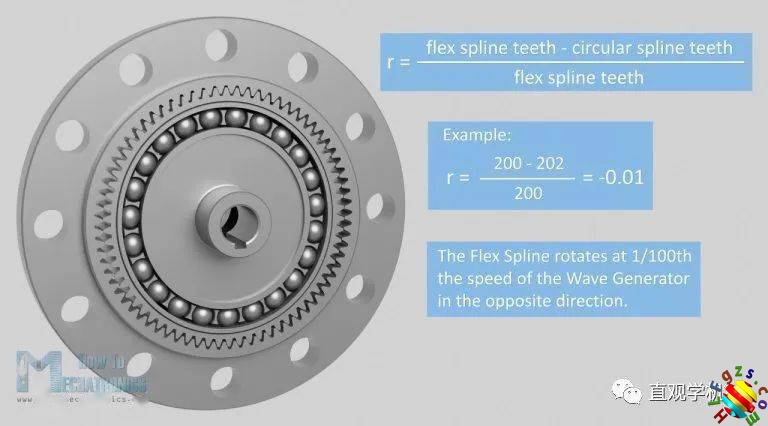
因此,以挠性花键上的200个齿和圆形花键上的202个齿为例,减速比为-0.01。这是波发生器速度的1/100,减号表示输出方向相反。
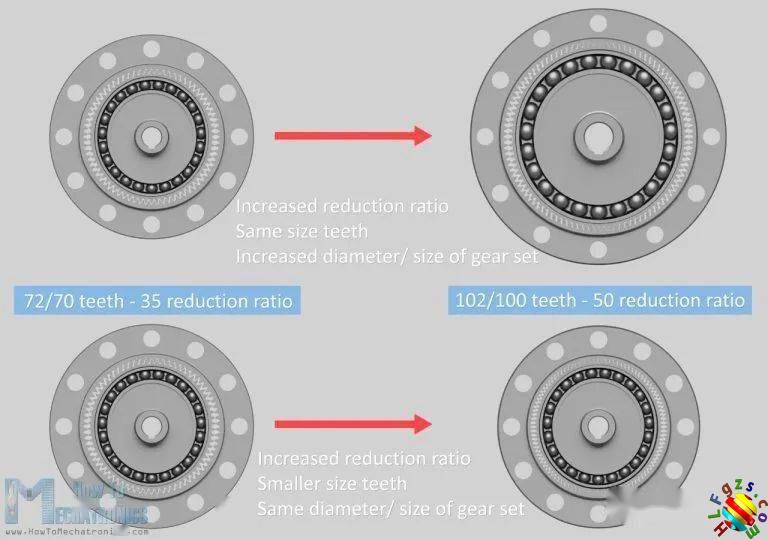
通过改变齿数,我们可以得到不同的减速比。
文章来源: 视频作者:How To Mechatronics, 翻译:直观学机械
免责声明:本文系网络转载,版权归原作者所有。但因转载众多,无法确认真正原始作者,故仅标明转载来源。本文所用视频、图片、文字如涉及作品版权问题,请第一时间告知,我们将根据您提供的证明材料确认版权并按国家标准支付稿酬或立即删除内容!本文内容为原作者观点,并不代表本公众号赞同其观点和对其真实性负责
