在使用汇川伺服的过程中,我们遇到了许多类似的情况,其中许多是伺服的一般应用,如丝杠、皮带、转盘等。这些问题的主要原因是汇川伺服负载惯性比参数H默认为108-15。默认情况下,自动调整功能未启用。汇川伺服驱动器参数设置方法怎么导入?

眩晕是指通过在相应模式下改变0901(刚度级别)参数,可自动调整增益、惯性、共振抑制等参数,以满足工作条件的要求。
默认情况下,汇川最新的伺服震荡模式4(自动调整-正常模式)处于打开状态,避免了设置惯性比和共振抑制的麻烦。否则,眩晕功能和电机负载可能会产生共振,该共振可以在功能打开后快速自动抑制。同样,如果没有眩晕功能,负载电机可能会产生抖动或尾随。打开此功能后,惯性比增益参数自动设置,运行稳定。
要提高伺服系统的响应能力,非常简单,只需增加参数0901(刚度级别)即可。
对于快速定位,将0900设置为模式6(自动调整-快速定位模式)。
此外,汇川可用性调试还具有一键自调整Etune功能。
ETune(Easy-tune)是指与向导界面的简单和谐。在向导的指导下设置相应的曲线轨迹和响应需求参数后,伺服将自动运行并学习最佳增益参数。学习后,可以保存参数并导出到公式中,以便复制和下载同一模型。
一般来说,Stune单参数调试是刚性和灵活性的;Etune一键调谐,自动优化。
此外,如果Itune等待更多功能解锁,无论机器类型和负载波动如何,Itune的智能调整都会得到稳定的响应。
1.负载惯性比
负载惯性比是多少?例如,蚂蚁可以承受几倍于自身重量的重量,而旋转电机可以驱动几倍于其自身惯性的动力。
惯性是一种物理量。线性运动对应于重量,旋转运动对应于惯性。我不会在这里重复。
负载惯性比定义为“外部机器的惯性矩/电机本身的惯性矩”
负载惯性比用于估计外部负载惯性,电机将根据此参数调整输出。
如上图所示,当负载惯性比设置不当时,很容易出现电机抖动、异常噪音等。
2.遵守指示的能力
刚性反映了伺服系统遵循指令的能力。当小功率电机锁定时,当刚度相对较低时,手可以轻松旋转电机(电机会立即返回其原始位置);刚度增加,电机锁定,难以拧紧。
汇川伺服刚度等级范围为0-41,参数编号为H09-01,默认值为12。
当惯性载荷较大时,可降低刚度等级;
高刚度载荷,如丝杠,可以提高刚度水平。
刚度越高,伺服响应越高,可以对应频繁加减速的场合,实现快速定位,但容易出现伺服抖动和异常噪声。
3.伺服调节
它包括位置回路增益、速度回路增益、转速回路积分常数等。对于不熟悉伺服调整的人,可以设置参数H09-00,让伺服自动调整这些参数。H09-00设置了一组增益。H第一组增益和第二组增益的参数将根据不同的刚度级别自动设置。
汇川伺服驱动器?总的来讲,Stune单参调试,刚性灵活;Etune一键调谐,自动寻优。此外还有如Itune等更多功能等你解锁,无论机器类型及负载波动如何都可以通过Itune智能调整获得稳定响应。
(一)伺服驱动器适配电机编码器
SV660P匹配绝对值编码器时,需要设置电机编号 H00-00=14101,
根据实际应用情况设置 H02-01。初次接通电池时会发生Er.731(编码器电池故障),
需要设置H0D-20=1 复位编码器故障,再进行原点复归操作。
电机铭牌上可以看到电机的编码器信息。


绝对值相关的设置如下:

(1) 23位编码器
1. 首先设置H0000=14101,设置完成后断电重启生效
2. 设置H0231=1,恢复出厂设置,目的在于把23Bit的电子齿轮比写入伺服,如果不方便恢复出厂设置手动到设置:H0507=8388608/H05111=8388608/H0A10=25165824
3. 设置H0201=0(不带电池) =1(带电池,丝杠负载)=2(带电池旋转负载)
(2) 20位编码器
1. 新机(IS620)出厂默认,不需要设置(如果其他原因需要设置请参考[2][3][4])
2. 首先设置H0000=14000,设置完成后断电重启生效
3. 设置H0231=1,恢复出厂设置,目的在于把20Bit的电子齿轮比写入伺服,如果不方便恢复出厂设置请手动设置:H0507=1048576/H05111=1048576/H0A10=3145728
4. 设置H0201=0(不带电池)
(二) 增益调节
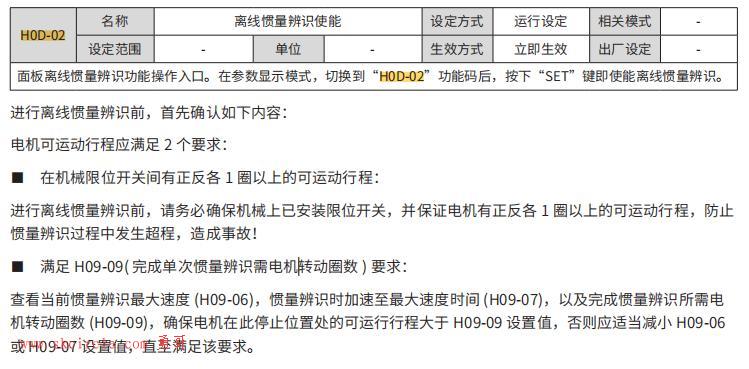
(1)离线惯量辨识
即自动计算出惯量值。
选择 H0D02 后 通过按面板上下键来使电机转动 此时面板显示的数就是惯量比,多按几次后,面板的数不再变化后长按SET 键 ,当显示SAVE后,松开SET键,辨识完成;
此操作马达会自动正反转一圈,因此要注意行程是否会撞机。
H0D-02说明如下:
(2)刚性调节
设置H0900=1
设置H0901=根据现场设定,默认是12,电机上使能后觉得电机出力小了,用手能推动的话就设置大一点,上使能后觉得电机声音大就设置小一点
马达刚性没设置好的现象,总结了几条:
刚性过大,一动起来立刻造成马达来回震荡停不下来。
震荡的原因是轴冲过头,然后自己再纠正,循环往复,所以无法停止。
轴出现异响,这种也是刚性调节过大的原因,注意这种异响在低速与高速时都可能出现。
用手搬动轴给个外力,可以搬动电机,一松手像弹簧一样缩了回来,这种也是刚性过小
在高速运动停止下来的时候,左右晃几次才停下。这种也是刚性太弱的表现。
刚性太弱,就会无力让电机立刻干脆的停下。
刚性低的话好比在伺服电机的联轴器改成扭转弹簧然后再输出。
眼看的结果就是,伺服已经转到位了但是由于负载作用,弹簧的变形使得输出端未达到伺服转动的角度。总是迟钝一点才来到。
感觉就是明明已经给指令了他还不走。明明指令停了。还要多走一段。
但是不等于定位不准。
马达刚性好,则电机响应会很快,停止也很干脆,一定的外力作用也可以稳稳的把电机hold住。
(3)共震抑制
如果发现电机运动到某个特定位置声音突然变大,请设置H0902=2后再运动到这个位置来回运动,待声音消失后再观察H0902,如果H0902不等于0,则手动改成0;
